Calculadora de triángulo rectángulo para calcular cateto y ángulo con precisión y pasos claros.
Este artículo contiene fórmulas, tablas responsivas, ejemplos resueltos y referencias normativas relevantes.
Calculadora de triángulo rectángulo — calcula cateto y ángulo
Calcula catetos, hipotenusa y ángulos agudos de un triángulo rectángulo a partir de combinaciones comunes de datos (hipotenusa, catetos, ángulo). Útil en diseño, topografía y verificación geométrica.
Valores típicos / referencias
| Ángulo θ (°) | sin θ | cos θ | tan θ |
|---|---|---|---|
| 30 | 0.50 | 0.866 | 0.577 |
| 36.87 (3-4-5) | 0.600 | 0.800 | 0.750 |
| 45 | 0.707 | 0.707 | 1.000 |
| 53.13 (3-4-5) | 0.800 | 0.600 | 1.333 |
| 60 | 0.866 | 0.500 | 1.732 |
Preguntas frecuentes
Definición técnica y alcance del cálculo
Un triángulo rectángulo tiene un ángulo de 90°; los catetos son los lados perpendiculares.
La calculadora para cateto y ángulo resuelve relaciones trigonométricas básicas y aplicaciones prácticas.
Principios matemáticos fundamentales
Se usan funciones seno, coseno, tangente y el teorema de Pitágoras para relaciones entre catetos y ángulo.
También se consideran razones recíprocas (cosecante, secante, cotangente) para cálculos inversos y estabilidad numérica.
Relaciones primarias en triángulo rectángulo
Hipotenusa (h), cateto opuesto (a), cateto adyacente (b), ángulo agudo (θ) forman el conjunto básico de variables.
Relaciones: sinθ = a/h, cosθ = b/h, tanθ = a/b; inversión mediante funciones arcoseno, arccoseno, arctangente.
Fórmulas completas y explicadas
A continuación se muestran todas las fórmulas necesarias para calcular cateto y ángulo en cualquier configuración conocida.
Cada fórmula incluye explicación de variables y valores típicos esperables en problemas prácticos.
Fórmulas elementales
Teorema de Pitágoras: h = sqrt(a² + b²), donde h es la hipotenusa, a y b son los catetos.
Seno: sin(θ) = a / h → a = h * sin(θ)
Coseno: cos(θ) = b / h → b = h * cos(θ)
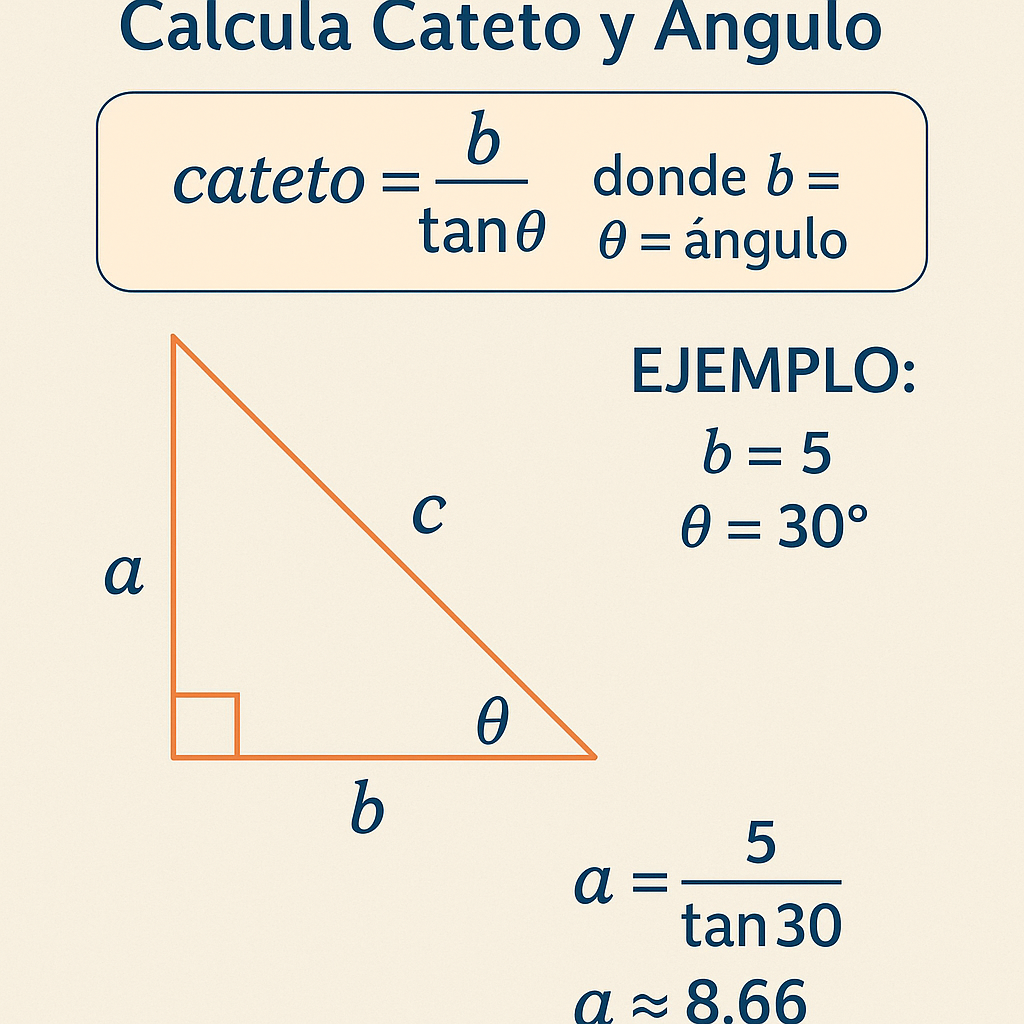
Tangente: tan(θ) = a / b → a = b * tan(θ) o b = a / tan(θ)
Funciones inversas para obtener ángulos
θ = arcsin(a / h) cuando a y h son conocidos; dominio: -1 ≤ a/h ≤ 1.
θ = arccos(b / h) cuando b y h son conocidos; dominio: -1 ≤ b/h ≤ 1.
θ = arctan(a / b) cuando a y b son conocidos; rango principal: (-90°, 90°) para valores en grados.
Formulación para cálculo robusto
Para estabilidad numérica cuando h está próximo a a o b, conviene usar identidades complementarias y normalización.
Ejemplo: si a ≈ h, calcular θ = arccos(b / h) evita pérdida de precisión por resta de cuadrados.
Variables y valores típicos
h (hipotenusa): longitud > 0. Valores típicos: 0.1 m (micro) a 1000 m (macro) según aplicación.
a (cateto opuesto): 0 ≤ a < h; valores típicos en ingeniería: centímetros a metros.
b (cateto adyacente): 0 ≤ b < h; en topografía y construcción suele medirse con ±1 mm de precisión.
θ (ángulo agudo): 0° < θ < 90°. Valores típicos en mecánica: 0.5° a 85°; en electrónica angular frecuente 30°, 45°, 60°.
Representación visual y tablas responsivas de valores comunes
Se incluyen tablas con combinaciones comunes de catetos, hipotenusa y ángulo para referencia rápida en proyectos.
Las tablas están diseñadas para adaptarse a pantallas de escritorio y móviles, con columnas legibles y alternancia clara.
| θ (grados) | sin(θ) | cos(θ) | tan(θ) | Relación a/h | Relación b/h |
|---|---|---|---|---|---|
| 30° | 0.5000 | 0.8660 | 0.5774 | a = 0.5·h | b = 0.8660·h |
| 45° | 0.7071 | 0.7071 | 1.0000 | a = 0.7071·h | b = 0.7071·h |
| 60° | 0.8660 | 0.5000 | 1.7321 | a = 0.8660·h | b = 0.5·h |
| 15° | 0.2588 | 0.9659 | 0.2679 | a = 0.2588·h | b = 0.9659·h |
| 75° | 0.9659 | 0.2588 | 3.7321 | a = 0.9659·h | b = 0.2588·h |
Tabla ampliada: catetos para hipotenusa estándar
Valores prácticos para h = 1, 2, 5, 10 unidades, útiles para previsualización rápida durante diseño.
La tabla sigue formato responsive para mantener legibilidad en dispositivos pequeños.
| θ | h=1 → a | h=1 → b | h=2 → a | h=5 → a | h=10 → a |
|---|---|---|---|---|---|
| 30° | 0.5000 | 0.8660 | 1.0000 | 4.3301 | 8.6603 |
| 45° | 0.7071 | 0.7071 | 1.4142 | 3.5355 | 7.0711 |
| 60° | 0.8660 | 0.5000 | 1.7321 | 4.3301 | 8.6603 |
Algoritmos y pasos para implementar una calculadora
Se describen flujos lógicos, control de errores y consideraciones numéricas para programación segura.
Incluye validación de dominios, manejo de unidades y recomendaciones para interfaces de usuario.
Pseudocódigo de cálculo
Entrada: dos de las tres variables {a, b, h} o una variable y un ángulo θ. Validar entradas positivas.
Caso A: a y b conocidos → h = sqrt(a² + b²); θ = atan(a / b).
Caso B: a y h conocidos → b = sqrt(h² - a²); θ = arcsin(a / h).
Caso C: b y h conocidos → a = sqrt(h² - b²); θ = arccos(b / h).
Caso D: θ y h conocidos → a = h * sin(θ); b = h * cos(θ).
Caso E: θ y a conocidos → b = a / tan(θ); h = a / sin(θ).
Validaciones y manejo de errores
Verificar dominios de funciones inversas: argumentos entre -1 y 1; evitar división por cero en tan(θ).
Comprobar coherencia dimensional: cateto < hipotenusa; si no, indicar error de entrada.
Ejemplos del mundo real — Caso 1: diseño de rampa accesible
Se diseña una rampa con hipotenusa (longitud de rampa) conocida y se necesita el ancho vertical y pendiente.
Datos: longitud de rampa h = 5.0 m; pendiente objetivo θ = 8.53° (aprox. 1:7,5). Calcular catetos.
Desarrollo paso a paso
Convertir ángulo a radianes si la calculadora usa radianes: θ = 8.53° → 0.1489 rad (aprox.).
Calcular cateto opuesto (altura vertical): a = h * sin(θ) = 5.0 * sin(8.53°) ≈ 5.0 * 0.1480 = 0.740 m.
Calcular cateto adyacente (proyección horizontal): b = h * cos(θ) = 5.0 * cos(8.53°) ≈ 5.0 * 0.9890 = 4.945 m.
Verificación por Pitágoras: sqrt(a² + b²) = sqrt(0.740² + 4.945²) ≈ sqrt(0.5476 + 24.453) ≈ sqrt(25.0006) ≈ 5.000.
Resultado: altura ≈ 0.740 m, proyección horizontal ≈ 4.945 m; pendiente confirmada ≈ 0.15 (15%).
Ejemplos del mundo real — Caso 2: calibración de antena
Se requiere orientar una antena desde una torre hacia un receptor a nivel distinto; conocido cateto horizontal.
Datos: diferencia de altura a = 12 m (vertical), distancia horizontal b = 40 m; obtener θ y h.
Desarrollo paso a paso
Calcular ángulo de elevación: θ = arctan(a / b) = arctan(12 / 40) = arctan(0.3) ≈ 16.699°.
Calcular hipotenusa: h = sqrt(a² + b²) = sqrt(144 + 1600) = sqrt(1744) ≈ 41.76 m.
Verificación de consistencia: sin(θ) ≈ 0.2872 → a/h ≈ 12 / 41.76 ≈ 0.2874, diferencia por redondeo aceptable.
Resultado: ángulo ≈ 16.70°, distancia directa ≈ 41.76 m; usar para orientación y beamwidth.
Aplicaciones avanzadas y consideraciones profesionales
Precisión: en topografía y metrología usar métodos de propagación de errores y cifras significativas.
Sensibilidad: pequeñas variaciones en ángulo se amplifican en catetos cuando θ cercano a 0° o 90°.
Propagación de incertidumbres
Si Δh es incertidumbre en hipotenusa y θ conocido con incertidumbre Δθ (radianes), incertidumbre en a:
Δa ≈ sqrt( (sinθ · Δh)² + (h · cosθ · Δθ)² ).
Si se conoce Δa y Δb, incertidumbre en θ mediante derivadas: Δθ ≈ sqrt( (∂θ/∂a · Δa)² + (∂θ/∂b · Δb)² ).
Conversión de unidades y manejo de ángulos
Siempre especificar unidades (m, cm, mm). Convertir ángulos entra grados/radianes según librería matemática.
Para interfaces, mostrar ambos formatos y ofrecer control de precisión (decimales significativos).
Recomendaciones de implementación UX y accesibilidad
Etiquetas claras, placeholders indicativos y validaciones en tiempo real mejoran tasa de éxito del usuario.
Evitar dependencias visuales exclusivas; usar texto alternativo en resultados y contraste suficiente.
Elementos de interfaz sugeridos
- Campos de entrada para dos variables con selección de unidades.
- Selector de tipo de entrada (longitudes o ángulos) y botón de calcular con estado deshabilitado hasta validación.
- Resultados mostrados con explicación y chequeos de coherencia (por ejemplo, cateto < hipotenusa).
Referencias normativas y fuentes de autoridad
Normas técnicas y referencias para prácticas de medición y cálculos trigonométricos aplicables en ingeniería:
- ISO 9836:1992 — Medición geométrica y presentación de resultados (relevante para precisión y tolerancias).
- ISO/IEC 80000-2 — Magnitudes y unidades de la matemática; conviene para especificación de unidades.
Enlaces de consulta:
- Organización Internacional de Normalización (ISO)
- Wolfram MathWorld — Pythagorean Theorem
- PubMed Central — artículos sobre metrología aplicada
Casos adicionales y ampliaciones
A continuación se proponen escenarios ampliados para profundizar en cálculos y validaciones.
Incluye casos con ángulos extremos, análisis de error y recomendaciones de mitigación.
Caso 3: ángulo muy pequeño — precisión numérica
Situación: h = 1000 m, θ = 0.1° → sin(θ) ≈ 0.0017453; a = 1.7453 m, b ≈ 999.9985 m.
Precaución: calcular b via sqrt(h² - a²) implica resta de casi iguales; mejor usar b = h * cos(θ) para estabilidad.
Caso 4: ángulo cercano a 90° — control de dominio
Situación: a ≈ h * 0.99999; calcular b = sqrt(h² - a²) puede dar resultado cercano a cero o error de subrepresentación.
En ese caso usar b = h * cos(θ) o computación en alta precisión de punto flotante para evitar pérdida de significancia.
Checklist profesional antes de publicar resultados
Validar coherencia dimensional, verificar dominios, comprobar redondeos y comunicar incertidumbres.
Documentar supuestos (unidades, convención de ángulos, número de decimales) para trazabilidad técnica.
Resumen de fórmulas y referencias rápidas
- h = sqrt(a² + b²)
- sin(θ) = a / h → a = h · sin(θ)
- cos(θ) = b / h → b = h · cos(θ)
- tan(θ) = a / b → a = b · tan(θ), b = a / tan(θ)
- θ = arcsin(a / h) = arccos(b / h) = arctan(a / b)
- Propagación de incertidumbres: Δa ≈ sqrt((sinθ Δh)² + (h cosθ Δθ)²)
Fuentes de consulta técnica y lecturas avanzadas
Documentos y textos recomendados para profundizar en trigonometría aplicada y metrología geométrica.
- Allen R. Miller, “Mathematical Methods for Engineers” — secciones de trigonometría aplicada.
- ISO y publicaciones de metrología para tolerancias en mediciones geométricas.
Notas finales para el desarrollador e ingeniero
Implementar pruebas unitarias para cada caso de entrada y mantener la trazabilidad de conversiones de unidades.
Ofrecer registros de cálculo y exportación en formatos abiertos para auditoría técnica en proyectos.