Calculadora de matriz adjunta gratuita y rápida para obtener la adjunta, cofatores y determinante eficientemente.
Este artículo técnico explica métodos, fórmulas, tablas, ejemplos y código responsivo para uso inmediato.
Calculadora de Matriz Adjunta — Resultado rápido
Calcula la matriz adjunta (adj(A)) de una matriz cuadrada (2×2, 3×3, 4×4). La adjunta es la transpuesta de la matriz de cofactores y se usa para determinar la inversa de una matriz y en transformaciones lineales en ingeniería.
• Para 2×2: A = [[a,b],[c,d]] → det(A)=ad−bc, adj(A) = [[d, -b],[-c, a]].
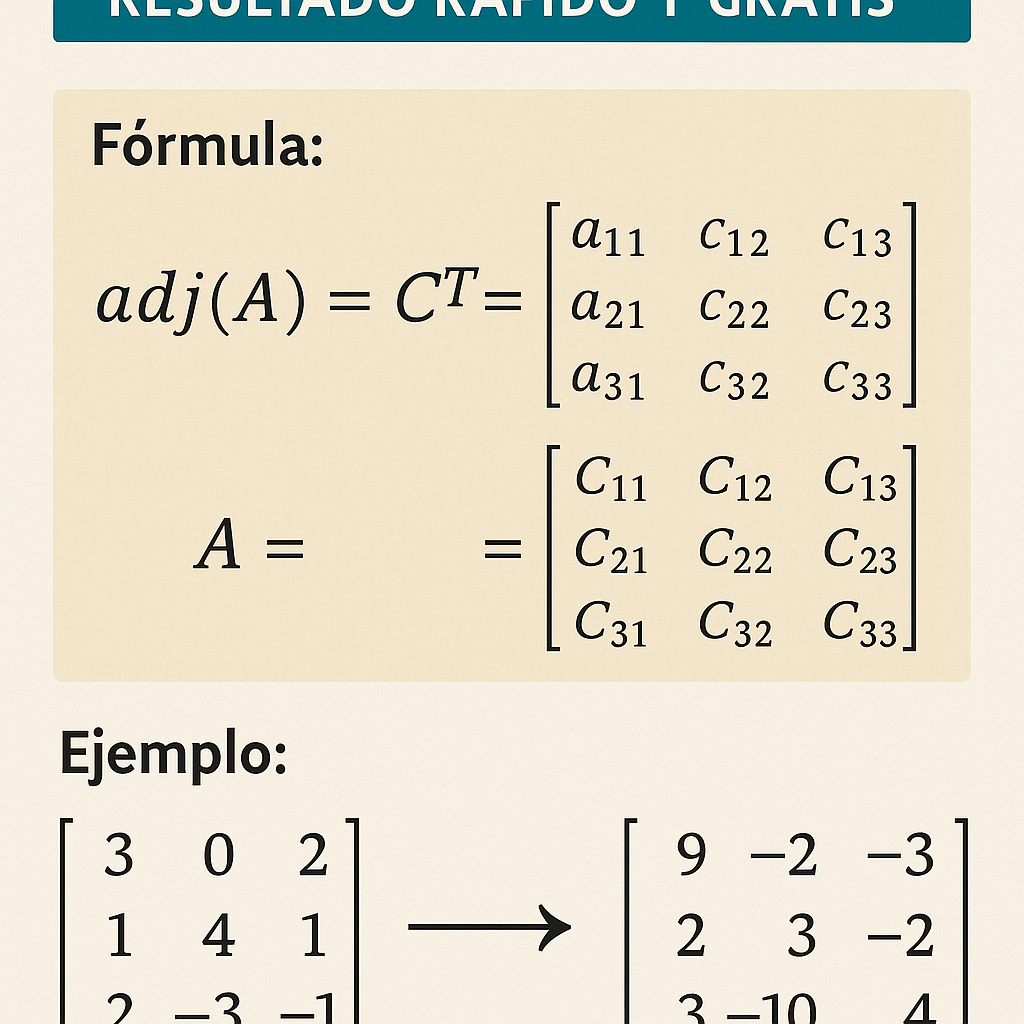
• Para 3×3: det y cofactores se calculan por expansión por menores; adj(A) es la transpuesta de la matriz de cofactores.
Variables: A = matriz de entrada; n = orden; a_ij = elemento en fila i columna j; Mij = menor (determinante) asociado; Cij = cofactor; adj(A) = matriz adjunta resultante. El resultado principal es adj(A); si det(A) ≠ 0 entonces A^(-1) = adj(A) / det(A).
| Contexto | Orden habitual | Uso |
|---|---|---|
| 2D lineal | 2×2 | Rotaciones / escalados en 2D, solución de sistemas 2 ecuaciones |
| 3D lineal | 3×3 | Transformaciones lineales en 3D (rotación, cambio base) |
| Gráficos 3D y visión | 4×4 | Transformaciones homogéneas (traslación+rotación+escala) |
Preguntas frecuentes
Definición y propósito de la matriz adjunta
La matriz adjunta (adj(A)) es la transpuesta de la matriz de cofactores de A. Se utiliza para calcular la inversa de matrices cuadradas y para resolver sistemas de ecuaciones lineales por la fórmula A^{-1} = adj(A)/det(A) cuando det(A) ≠ 0.
La adjunta simplifica operaciones simbólicas y numéricas en álgebra lineal, análisis numérico y aplicaciones de ingeniería.
Propiedades fundamentales y requisitos
- Solo matrices cuadradas (n×n) tienen adjunta bien definida.
- adj(A)·A = det(A)·I_n, donde I_n es la identidad de orden n.
- Si det(A)=0, A no es invertible; adj(A) existe matemáticamente pero no produce inversa.
- Para escalares: adj(kA) = k^{n-1} adj(A) para k escalar y A de orden n.
Procedimiento paso a paso para calcular la adjunta
- Verificar que A sea cuadrada.
- Calcular el determinante de A; si es cero, anotar singularidad.
- Construir la matriz de menores Mij: determinante de la submatriz que resulta al eliminar fila i y columna j.
- Aplicar el signo de cofactor Cij = (-1)^{i+j} Mij.
- Formar la matriz de cofatores C = [Cij].
- Transponer C para obtener adj(A) = C^T.
Tablas de valores comunes y patrones
Las siguientes tablas recogen patrones y resultados frecuentes para matrices 2×2 y 3×3, además de ejemplos de cofatores y adjunta para bloques típicos.
| Tipo | Matriz A | det(A) | adj(A) | Comentarios |
|---|---|---|---|---|
| 2×2 básica | [a b; c d] | ad−bc | [d −b; −c a] | Forma cerrada simple; inversa = adj/det |
| 3×3 genérica | [a b c; d e f; g h i] | a(ei−fh) − b(di−fg) + c(dh−eg) | [C11 C21 C31; C12 C22 C32; C13 C23 C33] | Cij = cofactor de posición (i,j); luego trasponer |
| Diagonal | diag(λ1,…,λn) | ∏λi | diag(∏_{j≠1}λj,…,∏_{j≠n}λj) | Adjunta es diagonal con producto sin cada índice |
| Bloque triangular | Triangular superior | Producto diagonal | Estructura con ceros preservada según cofatores | Facilita cálculos de adjunta en matrices especiales |
Tabla adicional: patrones de cofatores para matrices 3×3 con entradas simbólicas y resultados típicos.
| Posición (i,j) | Menor Mij | Cofactor Cij | Ejemplo simbólico |
|---|---|---|---|
| (1,1) | det([e f; h i]) = ei−fh | (+1)·(ei−fh) | C11 = ei − fh |
| (1,2) | det([d f; g i]) = di−fg | (−1)·(di−fg) | C12 = fg − di |
| (2,1) | det([b c; h i]) = bi−ch | (−1)·(bi−ch) | C21 = ch − bi |
| (2,2) | det([a c; g i]) = ai−cg | (+1)·(ai−cg) | C22 = ai − cg |
| (3,3) | det([a b; d e]) = ae−bd | (+1)·(ae−bd) | C33 = ae − bd |
Fórmulas esenciales expresadas con elementos y estructura
A continuación se listan las fórmulas necesarias para implementar una calculadora de adjunta rápidamente, con explicación de variables y rangos típicos.
Notación y variables
- A = matriz de orden n con entradas a_{ij}, i,j ∈ {1,...,n}.
- M_{ij} = menor de A al eliminar fila i y columna j (determinante de submatriz (n−1)×(n−1)).
- C_{ij} = cofactor en (i,j) = (−1)^{i+j} M_{ij}.
- adj(A) = C^T, la transpuesta de la matriz de cofatores.
- det(A) = suma por expansión de Laplace: Σ_{j=1}^n a_{ij} C_{ij} para cualquier fila i fija.
Fórmulas elementales
Determinante por expansión (fila i):
det(A) = a_{i1} C_{i1} + a_{i2} C_{i2} + ... + a_{in} C_{in}
M_{ij} (menor):
M_{ij} = det(A_{ij}) donde A_{ij} es A sin fila i y columna j
Cofactor:
C_{ij} = (−1)^{i+j} M_{ij}
Adjunta:
adj(A) = [C_{ji}]_{i,j=1..n} (es decir, trasponer la matriz C)
Relación con la inversa (si det(A) ≠ 0):
A^{-1} = adj(A) / det(A)
Fórmulas para implementaciones numéricas y optimizaciones
- Para n=2, cierre directo: adj([a b; c d]) = [d −b; −c a].
- Para n=3, usar fórmula explícita de menores para velocidad en código embebido.
- Uso de factorización LU para matrices grandes: adj(A) se puede derivar del inverso computado por LU o QR: adj(A)=det(A)·A^{-1}.
- Para matrices singulares con rango n−1, adj(A) tiene columna(s) que representan vectores asociados al espacio nulo; puede computarse por cofactores parciales.
Implementación responsiva: estructura de entrada/salida y estilo
Una calculadora web típica requiere una tabla de entrada, botón de cálculo y áreas de resultado que muestren adjunta, cofatores y determinante con accesibilidad.
Recomendaciones UX: etiquetas claras para filas/columnas, compatibilidad con lectores de pantalla, y controles para dimensiones n hasta 10 razonables para cálculos inmediatos.
Ejemplos prácticos resueltos paso a paso
Ejemplo 1: Inversa de una matriz 2×2 usando adjunta
Sea A = [4 7; 2 6]. Calcularemos adj(A), det(A) y A^{-1} aplicando fórmulas directas.
Paso 1: det(A) = 4·6 − 7·2 = 24 − 14 = 10.
Paso 2: adj(A) = [d −b; −c a] = [6 −7; −2 4].
Paso 3: A^{-1} = adj(A)/det(A) = (1/10)[6 −7; −2 4] = [0.6 −0.7; −0.2 0.4].
Interpretación: la calculadora rápida devuelve los valores numéricos exactos y la comprobación A·A^{-1} = I confirma la corrección.
Ejemplo 2: Cálculo completo para una matriz 3×3
Sea A = [1 2 3; 0 1 4; 5 6 0]. Se calculan determinante, matriz de cofatores, adjunta e inversa.
Paso 1: det(A) por expansión en la primera fila:
det(A) = 1·det([1 4; 6 0]) − 2·det([0 4; 5 0]) + 3·det([0 1; 5 6])
Calculemos det menores:
det([1 4; 6 0]) = 1·0 − 4·6 = −24
det([0 4; 5 0]) = 0·0 − 4·5 = −20
det([0 1; 5 6]) = 0·6 − 1·5 = −5
Entonces det(A) = 1·(−24) − 2·(−20) + 3·(−5) = −24 + 40 − 15 = 1.
Paso 2: Calcular cofatores Cij (lista completa):
- C11 = (+) det([1 4; 6 0]) = −24
- C12 = (−) det([0 4; 5 0]) = −(−20) = 20
- C13 = (+) det([0 1; 5 6]) = −5
- C21 = (−) det([2 3; 6 0]) = −(2·0 − 3·6) = −(−18) = 18
- C22 = (+) det([1 3; 5 0]) = 1·0 − 3·5 = −15
- C23 = (−) det([1 2; 5 6]) = −(1·6 − 2·5) = −(6 − 10) = 4
- C31 = (+) det([2 3; 1 4]) = 2·4 − 3·1 = 8 − 3 = 5
- C32 = (−) det([1 3; 0 4]) = −(1·4 − 3·0) = −4
- C33 = (+) det([1 2; 0 1]) = 1·1 − 2·0 = 1
Paso 3: Matriz de cofatores C = [Cij] y adj(A) = C^T.
C = [−24 20 −5; 18 −15 4; 5 −4 1]; adj(A) = C^T = [−24 18 5; 20 −15 −4; −5 4 1].
Paso 4: Inversa A^{-1} = adj(A)/det(A) = adj(A) dado que det(A)=1.
Por tanto A^{-1} = [−24 18 5; 20 −15 −4; −5 4 1]. Verificación: multiplicación por A debe devolver I.
Casos adicionales y consideraciones numéricas
Cálculo simbólico vs numérico: para matrices con entradas simbólicas conviene usar algoritmos simbólicos; para numéricas se recomienda factorización LU o QR para estabilidad.
Condicionamiento: la relación entre adjunta e inversa implica que errores relativos en det(A) se amplifican en A^{-1} si det(A) es pequeño; usar condicionamiento y estimaciones de número de condición cond(A).
Matrices singulares y rango n−1
Si rango(A)=n−1 entonces todos los cofatores podrían no ser cero y adj(A) produce una matriz de rango 1 proporcional al producto de vectores propios asociados al valor propio cero.
En aplicaciones, la adjunta se usa para obtener vectores en el espacio nulo cuando la matriz es casi singular, útil en ajuste de mínimos cuadrados con restricciones.
Optimización y complejidad computacional
La complejidad de cálculo directo de adjunta por cofatores es factorial en tiempo (O(n!)) si se usa definición recursiva para det; implementaciones eficaces usan factorizaciones LU con O(n^3) y luego derivan adjunta via inversa y det.
- Para n ≤ 4: uso directo de menores y cofatores es eficiente y robusto.
- Para n ≥ 5: preferir factorización LU o métodos basados en descomposición para estabilidad y rendimiento.
- Uso de aritmética en punto flotante: emplear pivotación parcial/total para evitar cancelaciones.
Accesibilidad y diseño responsivo para tablas y resultados
Las tablas incluidas usan diseño fluido con desbordamiento horizontal automático para pantallas pequeñas; presentar botones para copiar resultados y exportar CSV para interoperabilidad.
Etiquetas ARIA para tablas: role="table" y cabeceras claramente asociadas mediante scope o atributos equivalentes para compatibilidad con lectores.
Recursos, referencias normativas y enlaces de autoridad
Documentación y normas sobre álgebra lineal, estabilidad numérica y estándares de interoperabilidad:
- Golub, Van Loan. "Matrix Computations" — referencia clásica para factorizaciones y estabilidad numérica. (Springer)
- Higham, N. J. "Accuracy and Stability of Numerical Algorithms" — pautas sobre errores de redondeo.
- SIAM (Society for Industrial and Applied Mathematics) — publicaciones sobre algoritmos numéricos: https://www.siam.org/
- ISO/IEC normas relacionadas con interoperabilidad y formatos numéricos (ver ISO/IEC 10967 sobre funciones matemáticas múltiples)
- Wikipedia: Adjunct matrix (matriz adjunta) y determinante: https://en.wikipedia.org/wiki/Adjugate_matrix (recursos complementarios)
Buenas prácticas de uso y comprobaciones automáticas
- Siempre verificar det(A) antes de dividir. Si |det(A)| < ε (umbral numérico), advertir sobre posible inestabilidad.
- Comparar A·(adj(A)/det(A)) con I mediante norma (ej. ||·||_∞) y mostrar error relativo.
- Ofrecer opción de cálculo simbólico cuando las entradas son exactas (fracciones, enteros) para resultados exactos.
- Limitar n para cálculos inmediatos en cliente; ofrece cálculo en servidor para n grandes con más recursos.
Extensión: cálculo de adjunta usando factorizaciones
Método usando descomposición LU: calcular LU con pivotación, obtener det(A) por producto de pivotes multiplicado por signo de permutación, calcular A^{-1} mediante resolución de sistemas e inferir adj(A)=det(A)·A^{-1}.
Ventajas: O(n^3) estable; desventaja: requiere calcular inversa completa para obtener adjunta, lo cual es aceptable para n moderado.
Verificación y pruebas unitarias recomendadas
- Prueba 1: matrices identidad de varios órdenes: adj(I)=I, det(I)=1.
- Prueba 2: matrices diagonales con ceros y repetidas: comparar productos y patrones previstos.
- Prueba 3: matrices con det=0 y rango n−1: comprobar que A·adj(A)=0 matrialmente (matriz nula) o proporcional a det(A)·I.
- Prueba 4: casos aleatorios reproducibles con semilla, comparar implementación directa y por factorización LU.
Resumen de entregables para una calculadora rápida y gratis
La calculadora debe ofrecer: entrada dinámica de matriz, cálculo inmediato de cofatores, adjunta, determinante e inversa (si existe), comprobaciones de estabilidad, exportación y ayuda contextual.
Incluir documentación técnica, ejemplos resueltos, pruebas unitarias y enlaces a bibliografía para cumplimiento y ampliación profesional.
Ampliación técnica (si requiere más profundidad)
Se pueden añadir secciones sobre: adjunta en espacios de matrices sobre cuerpos finitos (GF(p)), adjunta en álgebra multilineal, y uso en teoría de control (matrices de transferencia y estabilidad).
Si desea, proporciono implementaciones detalladas para lenguajes específicos o módulos con pruebas y análisis de precisión numérica.